NASA outlines a future scenario of a moon base, but for this scenario to become a reality, there is a great need of developing new technologies. And one of these technologies is ATHLETE, presently in development at NASA.

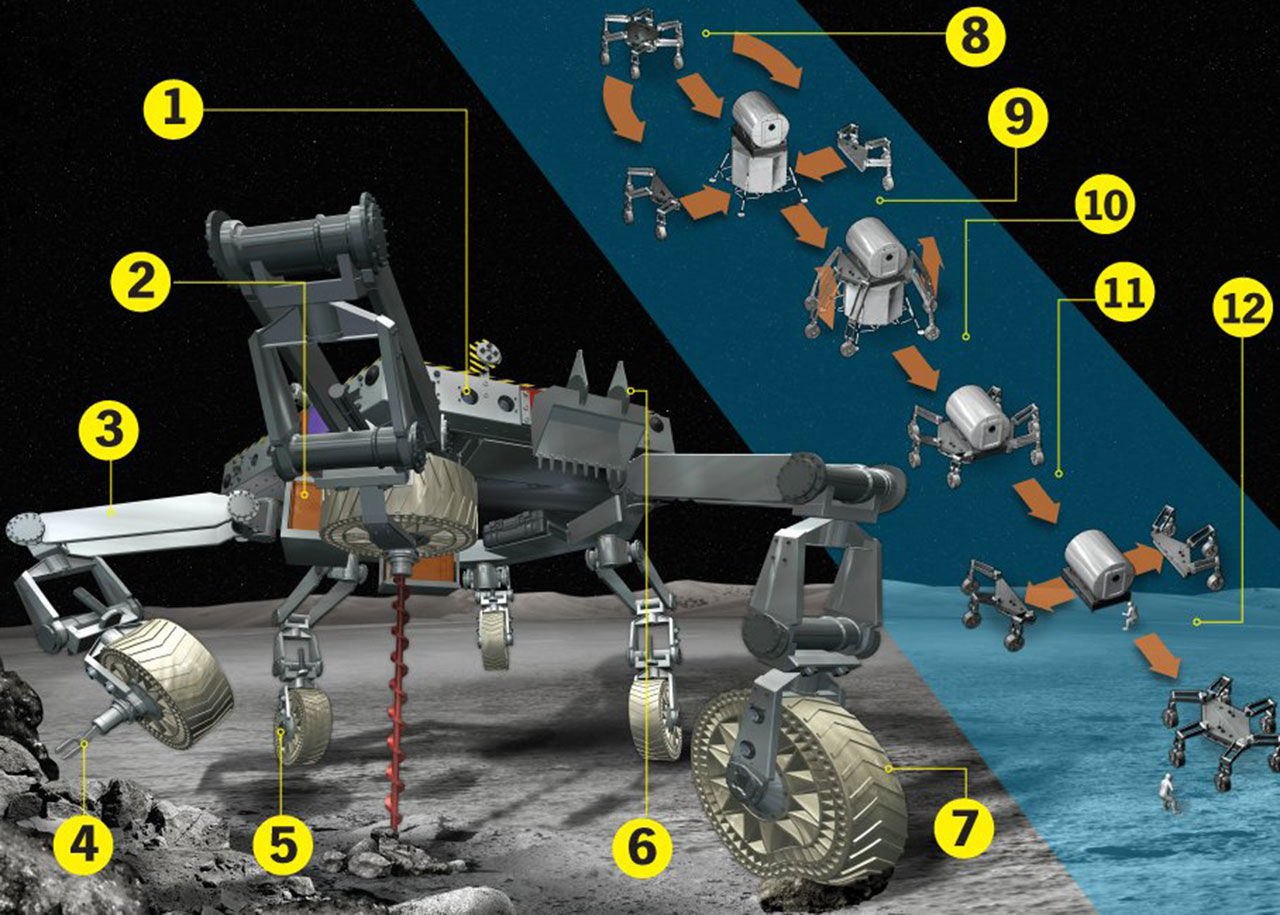
Even if the Moon makes everything less heavy, NASA sees a great need for enabling easier transportation of heavy equipment. A that’s where ATHLETE enters the picture, the “All-Terrain Hex-limbed Extra-Terrestrial Explorer” is a six-legged robotic lunar rover. A test-bed presently under development at the NASA Jet Propulsion Laboratory, in collaboration with NASA’s Johnson Center, the Ames Center, Stanford University and also Boeing.
The six legs of ATHLETE all have 6 degrees of freedom, which are enough degrees of freedom to be defined as general-purpose legs. This implies for instance that the wheels can be locked and the legs can then be used to walk with instead, in extreme terrain, where it proves too difficult to traverse with wheels.
These 6 DOF legs are also much more capable than those of other robotic systems such as Sojourner or the Mars Exploration Rovers. The ATHLETE can climb slopes up to 35° on solid surfaces and 25° on soft surfaces.
But there are other versions of the test-bed, the Tri-ATHLETE models are fully independent three-limbed robots. These allow for a straightforward cargo handling strategy with two Tri-ATHLETEs docking on opposite sides of a cargo pallet to form a six-limbed symmetrical vehicle and working together to move and emplace the cargo, then undock and depart.
NASA wants the robot to be ready for space mission 2017.