Last week the European Space Agency (ESA) and the Russian space agency Roscosmos, signed an agreement of a future joint mission to Mars. The outline for this mission would be to better understand the red planet’s soil and what it contains, as they plan to drill at least two feet into the ground, take samples and analyze these.
ExoMars
The project is called ExoMars (Exobiology on Mars) and the real aim is as its name foretell to search for possible biosignatures of Martian life. From both the past and the present.
ExoMars includes several spacecraft to be sent to Mars on two launchers. An orbiter spacecraft and a stationary lander planned for launch in 2016, and then a Russian lander to deliver a rover planned for 2018.
From NASA to Roscosmos
The project has undergone several phases and redesigns since it was first proposed back in 2005. The project was first thought to send a large robotic rover as a part of the ESA Aurora program, to be launched with a Russian Soyuz Fregat rocket.
It then evolved into a joint ESA and NASA project, each committing with circa 850 million euros each. NASA with its several successful missions to Mars has certainly achieved a great amount of accumulated knowledge. But in February 2012 the project was forced to be terminated by NASA to conform with federal budget allocation. ESA then turned to Rocossmos.
As of last week, the project is green-lit with an ESA budget of 850 million Euros, already allocated for the project, with a total budget granted at 1 billion Euros. This reached full partnership deal will comprise Russia contributing with two heavy launch vehicles, an entry, descent and a landing system for the rover mission.
ExoMars Objectives
ESA has outlined the following objectives for the ExoMars project, in order of priority.
- to search for possible biosignatures of Martian life, past or present.
- to characterise the water and geochemical distribution as a function of depth in the shallow subsurface.
- to study the surface environment and identify hazards to future manned missions to Mars.
- to investigate the planet’s subsurface and deep interior to better understand the evolution and habitability of Mars.
- achieve incremental steps ultimately culminating in a sample return flight.
The technological objectives to develop are:
- landing of large payloads on Mars.
- to exploit solar electric power on the surface of Mars.
- to access the subsurface with a drill able to collect samples down to a depth of 2 meters (6.6 ft)
- to develop surface exploration capability using a rover.
Two Phases
With a total of four spacecraft: two stationary landers, one orbiter, and a rover, to be sent in two launches. The scope of the project is large and the idea is for the first phase of landers to prepare and investigate the planet for the following second phase.
Phase 1 and the Trace Gas Orbiter
Phase 1 consists of the Trace Gas Orbiter (TGO) to be launched in 2016 with the ExoMars EDM lander docked. The TGO will be a Mars telecommunications orbiter and atmospheric gas analyzer. It will aim to map the sources of methane and other gasses on Mars, and in doing so also help select the landing site for the ExoMars rover to be launched on 2018.

The Entry, Descent and Landing Demonstrator Module (EDM) will test and provide ESA with technology and experience for landing to be used in phase 2. It will use an airbag landing system such as those used by NASA several times. First used during the Luna 9 and Luna 13 missions, which landed on the Moon in 1966. Later a larger and more refined technology again used when the Pathfinder rover landed on Mars in 1997, and then again with Opportunity and Spirit in 2003.
It will besides being a test-bed for the later rover in 2018 also test wind speed, direction, humidity, pressure and surface temperature. It will also make first measurements of electrical fields at the planet’s surface. And is to also be equipped with a color camera system.
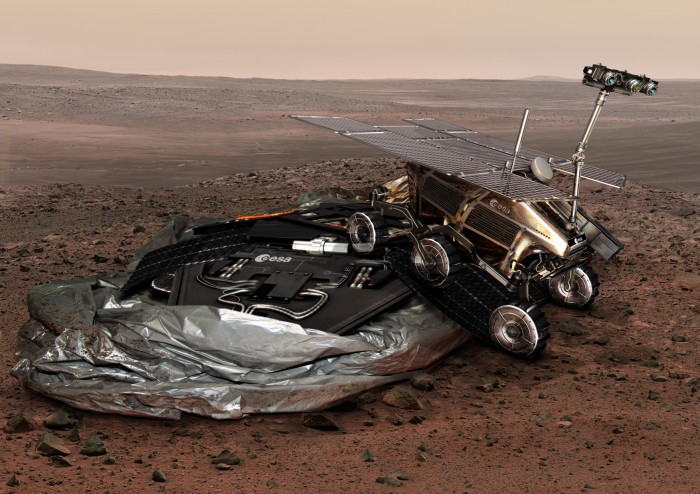
Phase 2 and the ExoMars Rover
Phase 2 will consist of the Russian landing system and the ExoMars rover. The rover is designed to navigate autonomously across the surface. With simple direction given by central command on Earth. It will navigate using navigation software with stereo cameras to allow for a 3D map of the terrain to be created.
The rover will be equipped with several mapping systems, such as the PanCam that has been designed to search for morphological signatures of past biological activity preserved on the texture of surface rocks. The Infra-red Mapper is an infrared spectrometer designed to measure rock, soil and atmospheric spectra. With a high enough resolution to be able to identify the features of carbonates, phyllosilicates, sulfates, silicates, organic molecules, and minerals formed in water.

It will also be equipped with a drill that is designed to acquire soil samples from a maximum depth of 2 meters The drill will acquire a core sample, extracting it and delivering it to the Rover Payload Module, where the sample will be distributed, processed and analyzed.
Its analytic systems will consist of The Mars Organic Molecule Analyzer (MOMA), a laser to evaporate and a GC-MS spectrometer to examine. An Infrared imaging spectrometer (MicrOmega-IR), that can analyze the powder material derived from crushing samples collected by the drill. A Raman spectrometer (Raman) that will provide geological and mineralogical context information complementary to that obtained by MicrOmega-IR.
The rover will also have a Ground-penetrating radar called WISDOM (Water Ice and Subsurface Deposit Information On Mars) that will explore the subsurface of Mars to help select interesting buried formations from which to collect samples for analysis.
And a Mars Multispectral Imager for Subsurface Studies (Ma-MISS). It is an infrared spectrometer located inside the drill and will enable analysis of the lateral wall of the borehole created by the drill, to possibly understand the distribution and state of water-related minerals, and characterize the geophysical environment.
______________
ExoMars
ExoMars Status
The Urey Instrument: An Advanced In Situ Organic and Oxidant Detector for Mars Exploration
____________________________