Robots will fly around exploring distant planets in the near future, this is if NASA’s plans to become a reality.
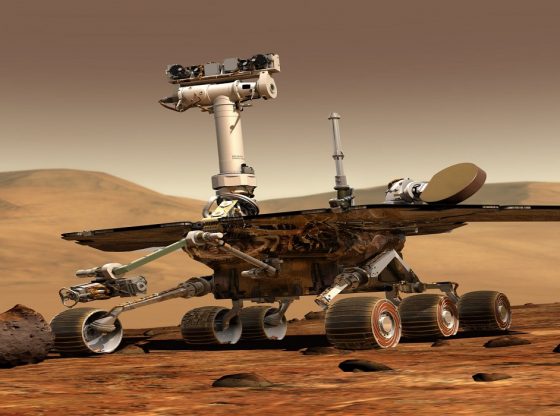
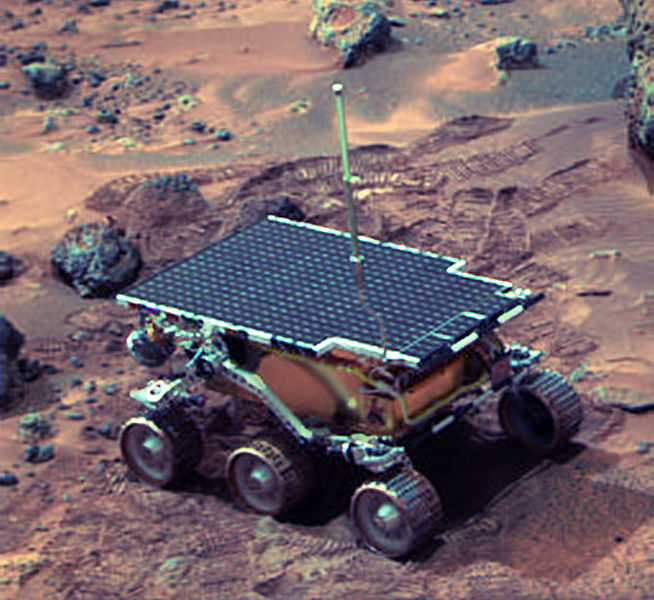
Instead of slow-moving robots on four wheels such as the NASA rovers MSL Curiosity and Pathfinder Sojourner. We will see robots getting about in all manner of ways. As these future robots will fly, float, crawl and dig their way across and through alien planets, autonomously exploring.
Physicist Wolfgang Fink and his colleagues at the California Institute of Technology in Pasadena aim to build and test prototypes of what could be the future of thinking, autonomously working robots.
Autonomous
The robotic vehicles of today are all controlled from Earth, although having some autonomous abilities, they obediently follow a predetermined route and cannot for example stop and take pictures if they were to come across something interesting on the way.
Moreover, it takes a long time to send signals back and forth to Earth. As it takes more than an hour for signals to travel to or from Saturn’s moon Titan. This time latency could prove determinate if we ever are to send flying robots to the moon. As they move around much faster, they would require a great need of fast decision making. Coming across some unforeseen obstacles, dodging sudden bad weather – making them more autonomous would certainly greatly increase their safety.
A Caltech and University of Arizona Collaboration
Wolfgang Fink, writes in a Caltech press release, “We are departing from traditional approaches of a single robotic spacecraft with no redundancy that is Earth-commanded to one that allows for having multiple, expendable low-cost robots that can command themselves or other robots at various locations at the same time.”.
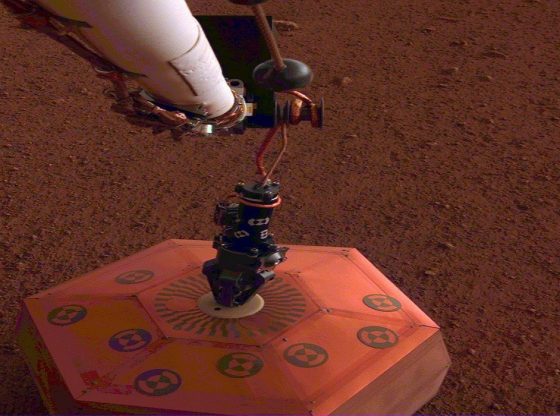
The MSL rover Curiosity presently roving across mars does have some autonomous capacity. NASA gives it commands to perform certain tasks, to dig here, or go there, and the rover will do as commanded, as there is no need to control Curiosity’s every moment, moving its wheels or steering its robotic arm.
Caltech now collaborates with the University of Arizona to develop software that can do much more than Curiosity. Software that can analyze images, distinguish colors, shapes, and obstacles. Making robots able to get around and orientate themselves in an alien environment. The scientists are now testing the software on a robot, making it continually better to read its surroundings and making it more independent.
Titan
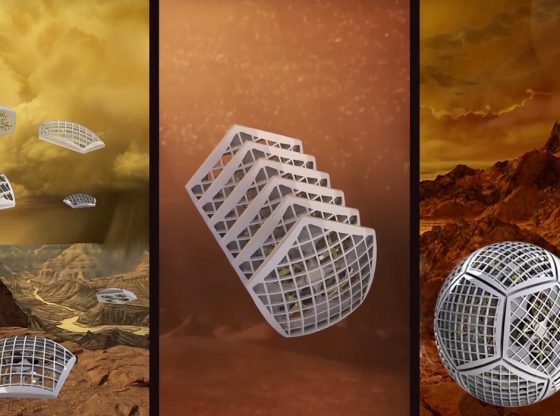
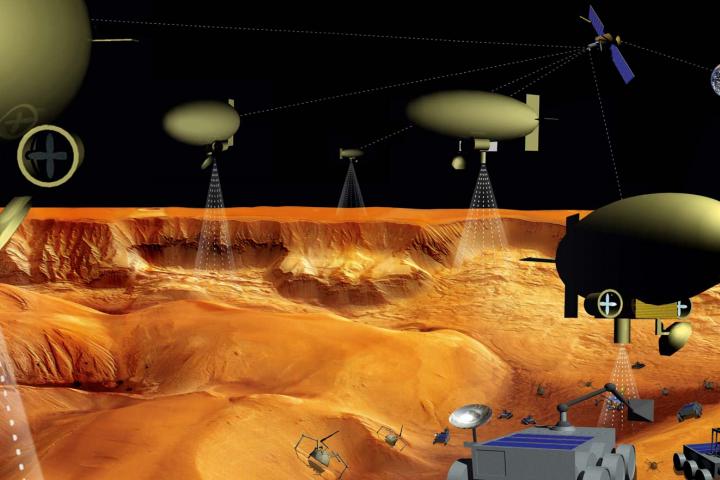
Fink outlines a mission of exploring Saturn’s moon Titan using three different kinds of craft: a satellite in orbit to communicate and identify interesting regions on the surface, a surface probe, and a hot air balloon robotic probe.
The idea is for the probes to communicate and collaborate with each other. “In the future, multiple robots will be in the driver’s seat,” Wolfgang Fink writes.
Titan is the largest moon of Saturn, it is thought to be a promising host for microbial extraterrestrial life. Data from the NASA Cassini probe indicate a complex chemistry on the surface. Experts say is the only moon around the planet to have a dense atmosphere. An environment rich in complex organic chemistry with a possible subsurface liquid ocean. But instead of water, liquid ethane and/or liquid methane flows its surface, in rivers and seas.
To put this vision into practice, researchers at Caltech have designed a mini zeppelin that hovers over a test track. The researchers are testing the airship’s ability to independently send messages to other small robotic vehicles. This test track is open to researchers worldwide, to participate in exercises online.
Wolfgang Fink concludes, “One day an entire fleet of robots will be autonomously commanded at once. This armada of robots will be our eyes, ears, arms, and legs in space, in the air, and on the ground, capable of responding to their environment without us, to explore and embrace the unknown,”.
______________
Robot Armada Might Scale New Worlds
____________________________